CleanFlightによる設定 Beerotor
Beerotor独自の設定
受信機はBeerotorF3のSBポートに接続された専用のケーブルを用いて行います。FCに向かって左側3本からSBus接続用のコネクタ、右側3本がPPM接続用のコネクタ、中央のグレーは受信機からのRSSI信号用のコネクタとなっています。
ここではフタバのSbus出力を持つ受信機を接続するケースを紹介します。
FCに向かって左側3本につながっているコネクタを受信機のSbus用出力ポートに接続します。
BeerotorF3とパソコンをUSBを接続するとFC経由で5Vの電源が受信機に提供されますので受信機と送信機のリンクを行います。
受信機と送信機とのリンクの方法は使用する送信機毎に異なりますので説明書等を参考に設定を行ってください。 フタバのR3008SBの場合、T-FHSS Air方式ですので送信機のモデルセレクト画面からRXとしてT-FHSS Airを指定します。
この状態で受信機の電源をONにする(USBを接続する)と受信機のLEDが赤色から緑色に変わり送信機のLINKの欄にIDが表示されればリンクが完了です。
これで受信機からフライトコントロラーへ信号が送れる状態となります。
[基本設定] ここではフタバの送信機に対応しSbusを出力する受信機をBetaflightに接続する場合の基本的な設定要領を記載します。
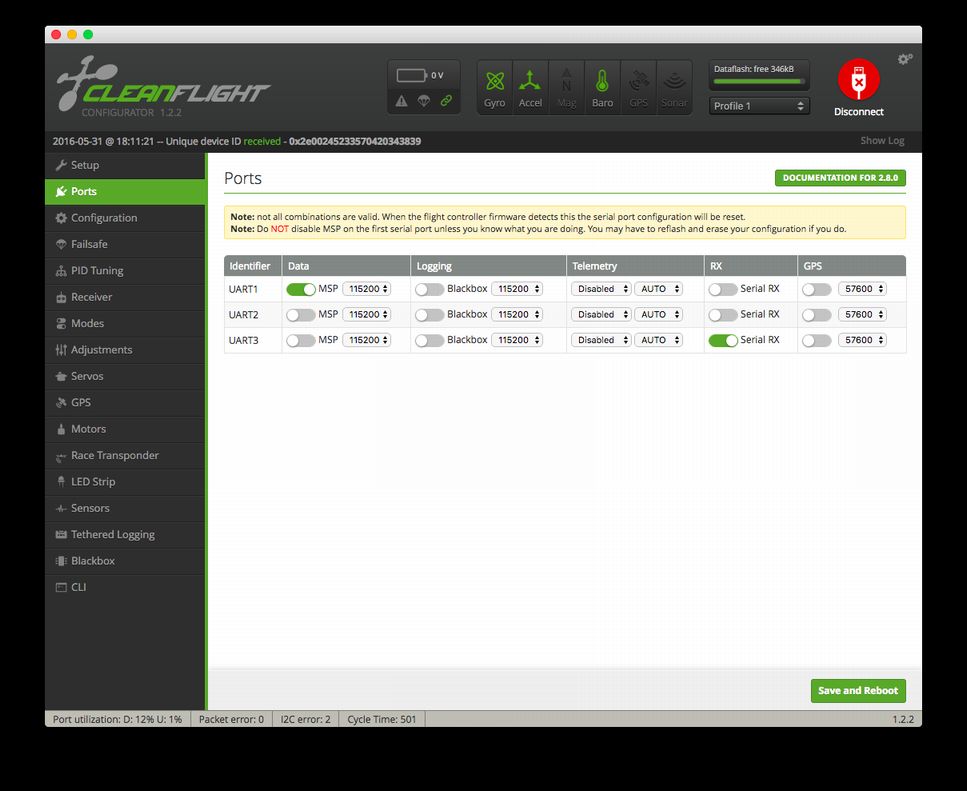 メニューからPortsを選択します。
メニューからPortsを選択します。BeerotorF3はSbusをUART3で受信する仕様となっていますのでPortsの設定画面でUART3のSerialRXをONにします。(Sbusで受信機からの信号を受け取る場合) 右下の「Save and Reboot」をクリックし設定を保存します。
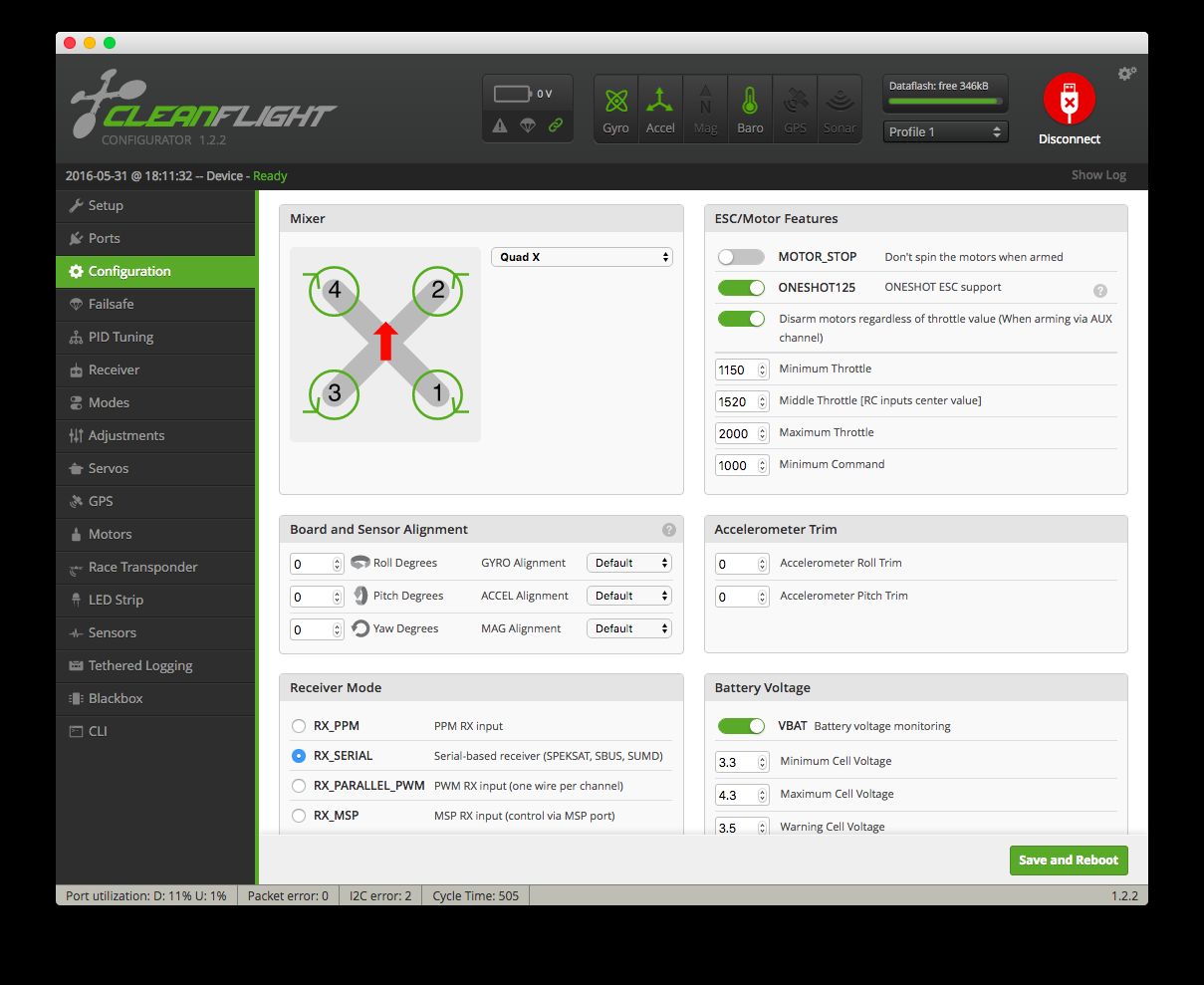 メニューからConfigurationを選択します。
メニューからConfigurationを選択します。フタバの送信機を使用している場合はMiddle Throttleを1520に設定します。
Maximum Throttleを2000に設定します。(制御のための余裕をもたせてデフォルトの1850程度とするのが良いという意見もあります。私はモーターの最大出力を出せるよう2000に設定しています。) Minimum ThrottleはESCのキャリブレーション後に設定します。
MOTOR_STOPをONにするとアームした状態でモーターを停止することができるのですがアームした状態に気づかずスロットルが体に触れてモーターが回転してしまうなど事故の原因ともなりますので私はMOTOR_STOPをOFFにしています。
Sbusを使用しますのでReceiver ModeをRX_SERIALを選択します。
Serial Receiver ProvideとしてSBUSを選択します。
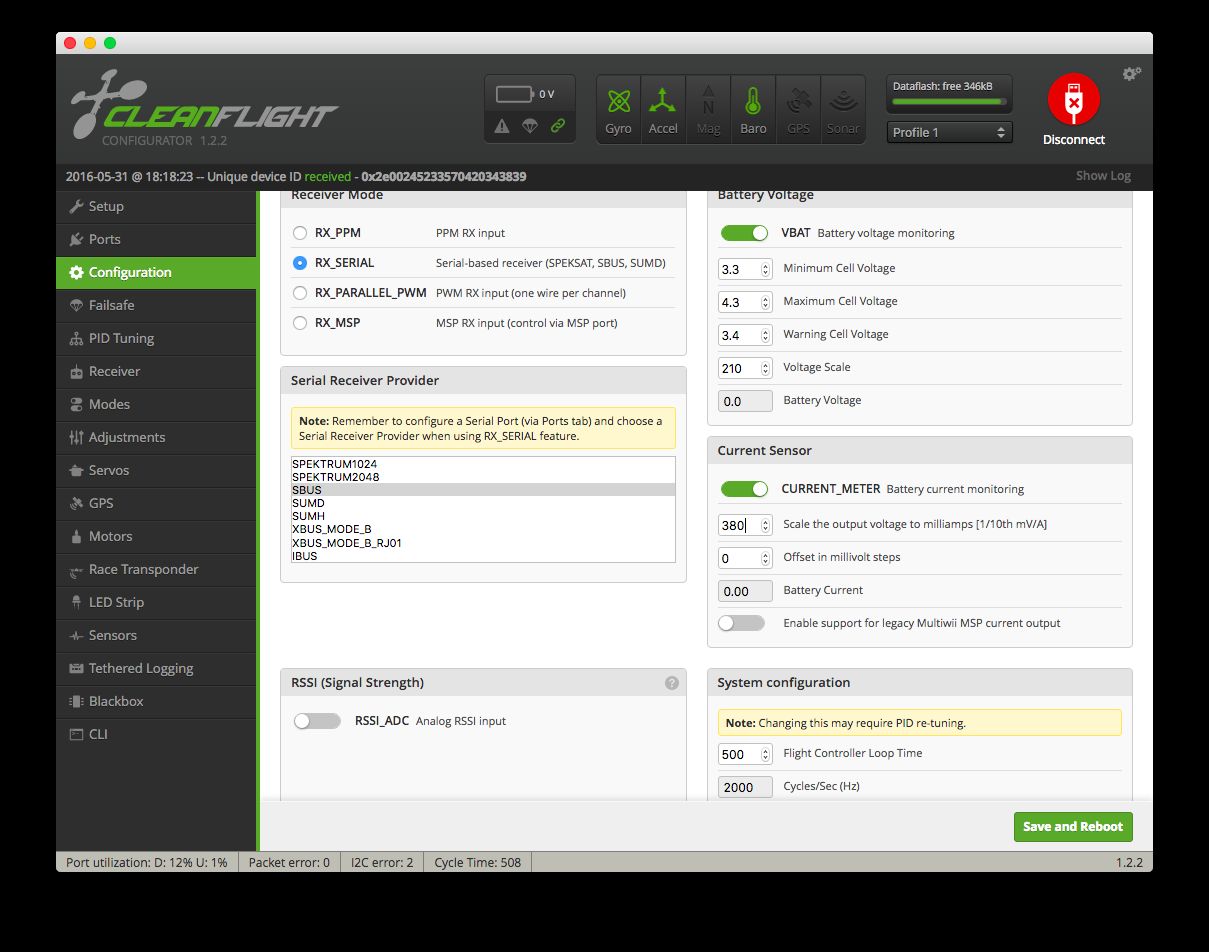 Battery VoltageのVoltage Scaleを210に設定します。(BeerotorF3固有の補正値)
Battery VoltageのVoltage Scaleを210に設定します。(BeerotorF3固有の補正値)電流をOSDに表示する場合はCURRENT_METERをONにします。
Scale the output voltage to milliampsを380に設定します。(BeerotorF3固有の補正値)
右下の「Save and Reboot」をクリックし設定を保存します。
 メニューからPID Tuningを選択します。
メニューからPID Tuningを選択します。PIDの調整は実際に飛行するようになってから行いますがここでは使用するPID Controllerを選択します。
ここは好みで指定すれば良く安定した無難なものが良ければデフォルトで設定されているMulti Wii Rewriteで良いかと思います。F3プロセッサのメリットを享受するにはLuxFloatを選択します。
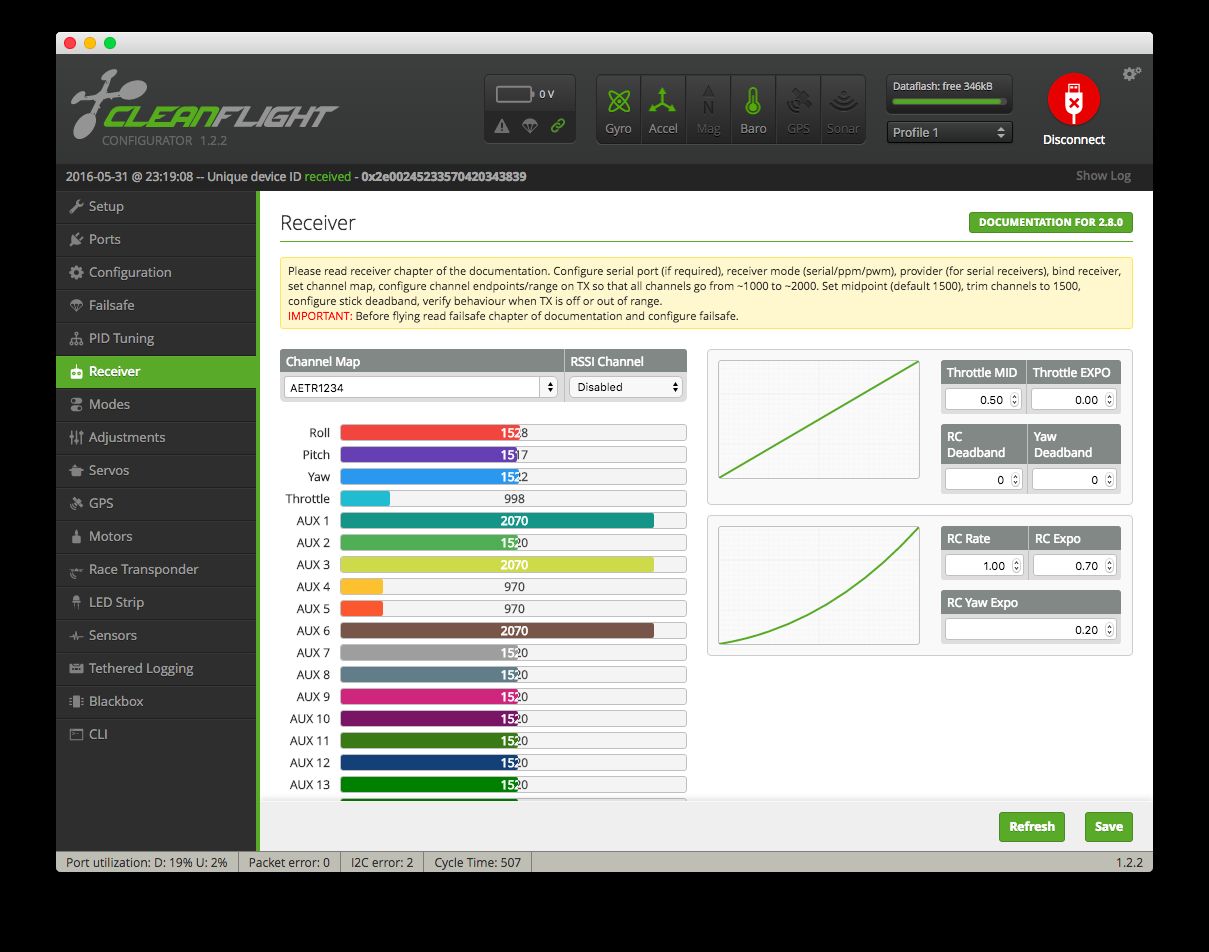 メニューからReceiverを選択し送信機のスティック操作に関する設定を行います。
メニューからReceiverを選択し送信機のスティック操作に関する設定を行います。まず左上のChannerl Mapで各スティックと機体動作の対応付けを行います。
フタバ製送信機Mode2マッピングの場合は「AETR1234」となります。
AETRは飛行機でいうエルロン(Aileron), エレベーター(Elevator), スロットル(Throttle), ラダー(Rudder)の操作に対応します。
次に送信機側のエンドポイント設定によって各スティックに対応する出力が最小値1000から最大値2000程度になるようにプロポのエンドポイントを調整します。
設定が終わったら右下の「Save」をクリックして設定を保存します。
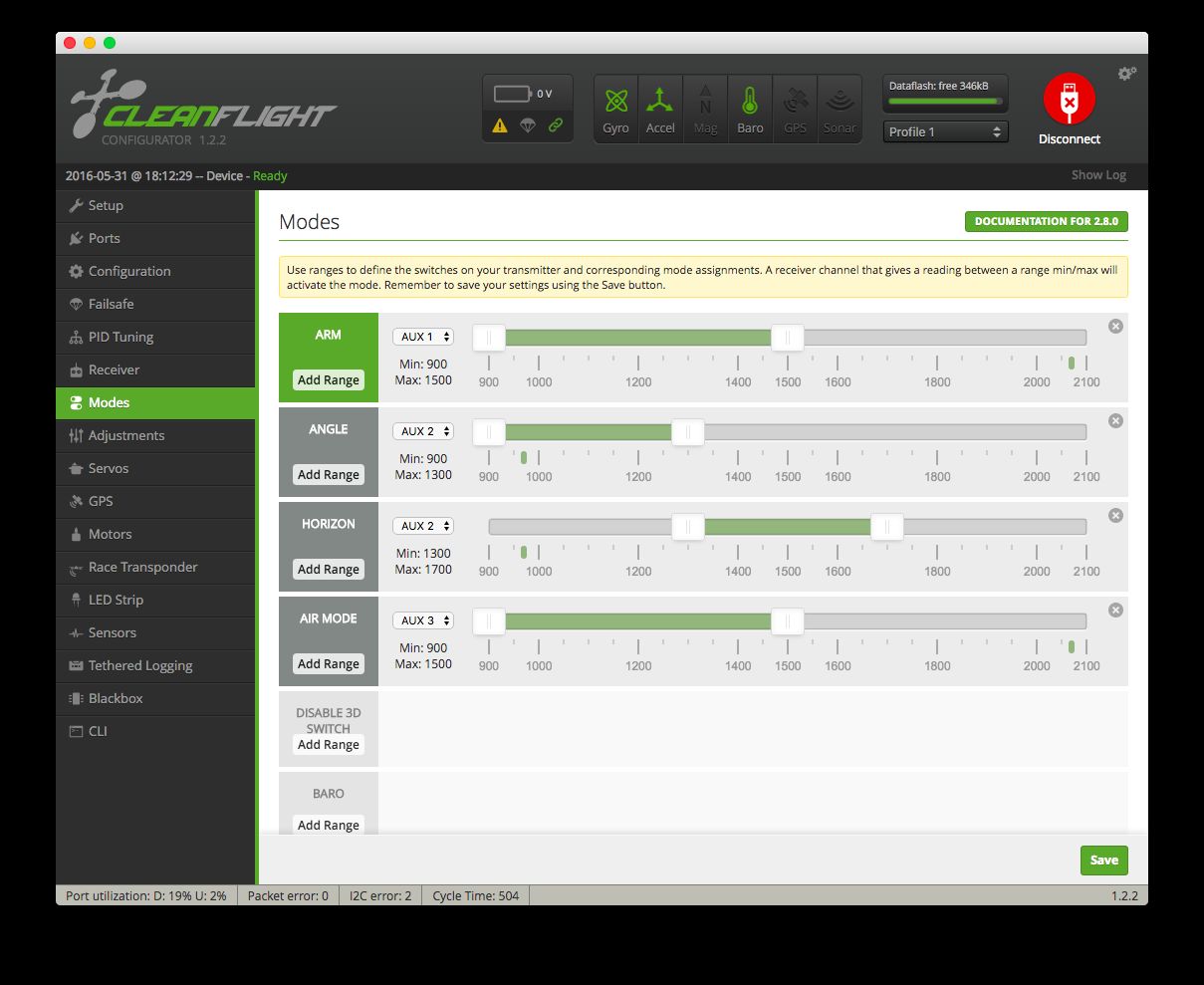 メニューからModesを選択します。
メニューからModesを選択します。ここではアーミング(モーターのメインスイッチ)、フライトモードの変更、エアモードのスイッチ、機体発見用ブザーのスイッチを設定します。
送信機側の設定でAUX1,AUX2,AUX3,AUX4 に上記に使用したいスイッチを指定します。
 対応する各AUXを用いて各モードがONとなる範囲を設定していきます。
対応する各AUXを用いて各モードがONとなる範囲を設定していきます。ANGLE, HORIZONは自動的に飛行を安定させる制御を行う飛行モードとなりANGLEがより安定したモード、HORIZONが中間、このどちらでもない状態がACROモードとなり機体の安定制御を行わないモードとなります。
レースドローンは基本的にこのACROモードで飛行させるのが一般的です。
エアモードはスロットルOFF(1000)の状態においても機体の姿勢のコントロールを可能とするモードで空中でスロットルオフを多用するフリースタイルの飛行で主に使用します。
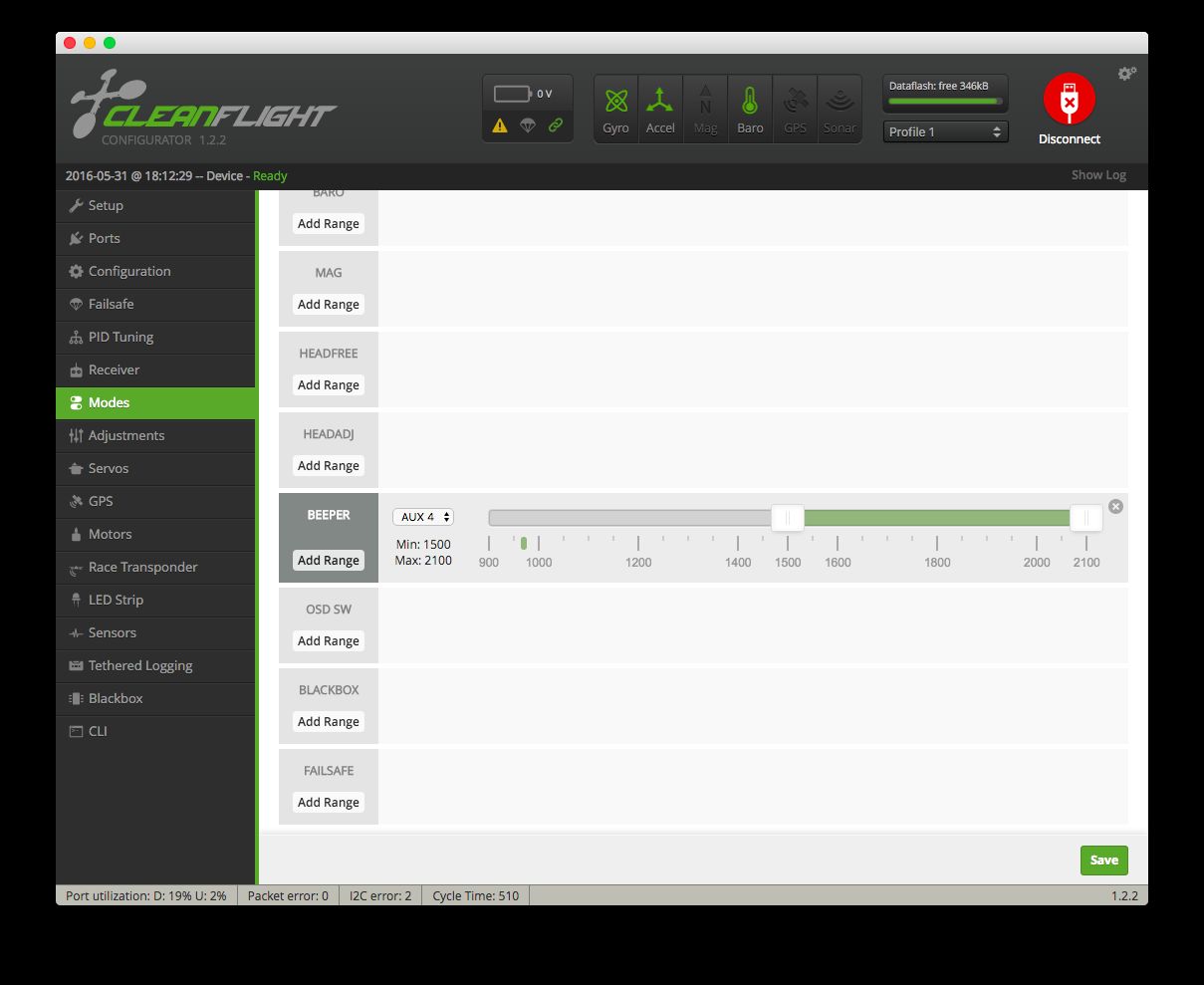
ブザーは機体捜索時などにブザー音を発生させるために使用します。
設定が終わったら右下の「Save」をクリックして保存します。